Artificial Neural Networks (ANN) is a Machine Learning model inspired by the networks of biological neurons found in our brains
The Perceptron
- one of the simplest ANN architectures
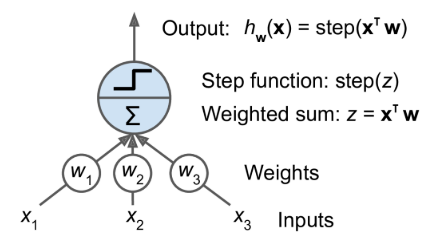
- Threshold logic unit (TLU): also called a linear threshold unit
- TLU computes a weighted sum of its inputs, then applies a step function
- A single TLU can be used for simple linear binary classification
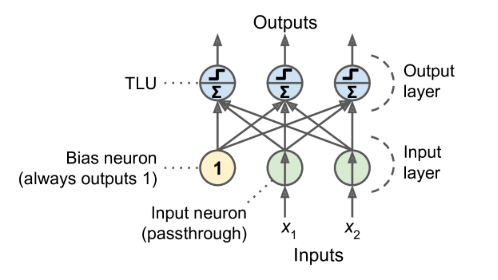
- Perceptron
- composed of a single layer of TLUs
- each TLU connects to all the inputs
- All the input neurons form the input layer.
- an extra bias feature is generally added (x0 = 1): it is typically represented using a special type of neuron called a bias neuron, which outputs 1 all the time
- structure
- formula for outputs
- \[h_{W,b}(X)=\phi(XW+b)\]
- $X$: input features, one row per instance, one col per feature
- $W$: connection weights except for the one from the bias neuron (yellow circle) , one row per neuron, one col per unit in the layer
- $b$: all the connection weights between the bias neuron and the neurons in the output layer
- $\phi$: the activation function: when the artificial neurons are TLUs, it is a step function
- learning rule
- The Perceptron is fed one training instance at a time
- for each instance it makes its predictions and adjusts the weights
- Linear decision boundary, only solve linearly separable problem
- Notes
- Perceptrons make predictions based on a hard threshold,
Multilayer Perceptron (MLP)
-
Intro
- stacking multiple Perceptrons, each layer has a bias neuron
- allows to handle complicated decision boundaries
- Also called feedforward neural network or fully connected neural network
-
Backpropagation
- the backpropagation algorithm is able to compute the gradient of the network’s error with regard to every single model parameter
- It handles one mini-batch at a time, and it goes through the full training set multiple times. Each pass is called an epoch
- steps when training NN
- Each mini-batch is passed to the network’s input layer, we get the output of the last layer, the output layer (forward pass)
- Next, the algorithm measures the network’s output error
- Then the algorithm measures how much each connection contributed to the error and uses the chain rule working backward until reaching the input layer
- finally the algorithm performs a Gradient Descent step to tweak all the connection weights in the network, using the error gradients it just computed.
- Notes
- It is important to initialize all the hidden layers’ connection weights randomly, or else training will fail
-
Activation functions
- sigmoid function
- hyperbolic tangent function \(tanh(z)=2\sigma(2z)-1\)
- S-shaped, continuous and differentiable like sigmoid function
- ranges from -1 to 1
- each layer’s output more or less centered around 0 at the beginning of training, which often helps speed up convergence
- Rectified Linear Unit Function $ReLU(z)=max(0,z)$
- continuous, not differentiable at z=0
- In practice, it works very well and has the advantage of being fast to compute, so it has become the default
- it does not have a maximum output value so that it helps reduce some issues during Gradient Descent

- Regression MLP
- output layer
- single value: a single output neuron
- multivariate regression: one output neuron per output dimension
- activation function
- don’t use any activation function for the output neurons so the NN are free to output any range of values
- use ReLU in the output layer when output need to be positive
- or softplus (a smooth variant of ReLU)
- 0-1 range output: sigmoid function
- -1 - 1range output: hyperbolic tangent
- Loss function
- MSE
- many outliers: MAE
- combination of both: Huber loss
- output layer
- Classification MLP
- binary
- a single output neuron
- logistic function
- multiclass
- 1 neuron per class
- softmax function
- multilabel binary
- 1 per label
- logistic function
- Loss function
- cross-entropy loss
- binary
Implementing MLPs with Keras
Sequential API
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
import tensorflow as tf
from tensorflow import keras
# method 1
model = keras.models.Sequential()
model.add(keras.layers.Flatten(input_shape=[28, 28]))
model.add(keras.layers.Dense(300, activation="relu"))
model.add(keras.layers.Dense(100, activation="relu"))
model.add(keras.layers.Dense(10, activation="softmax"))
# method 2
model = keras.models.Sequential([
keras.layers.Flatten(input_shape=[28, 28]),
keras.layers.Dense(300, activation="relu"),
keras.layers.Dense(100, activation="relu"),
keras.layers.Dense(10, activation="softmax")
])
# plot model
keras.utils.plot_model(model, to_file="my_fashion_mnist_model.png", show_shapes=True)
# compile model
model.compile(loss="sparse_categorical_crossentropy",optimizer="sgd",metrics=["accuracy"])
# fit model
history = model.fit(X_train, y_train, epochs=30,
validation_data=(X_valid, y_valid))
# plot learning curves
import pandas as pd
pd.DataFrame(history.history).plot(figsize=(8, 5))
plt.grid(True)
plt.gca().set_ylim(0, 1)
save_fig("keras_learning_curves_plot")
plt.show()
Functional API
-
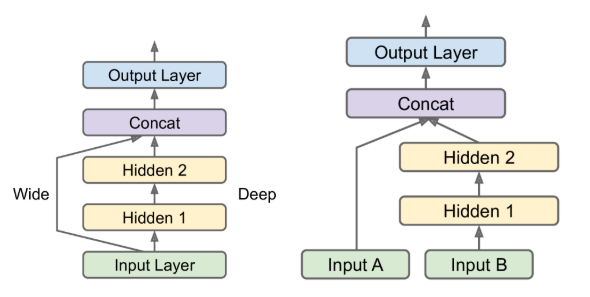
Could be used to build complex models
-
Wide and Deep NN: this architecture makes it possible for the neural network to learn both deep patterns (using the deep path) and simple rules (through the short path)
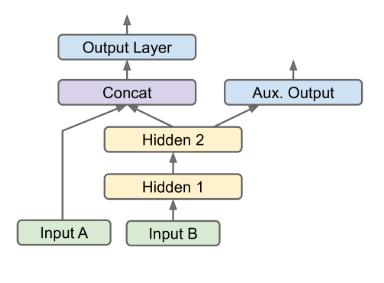
-
add some auxiliary outputs in a neural network architecture to ensure that the underlying part of the network learns something useful on its own, without relying on the rest of the network.
-
-
code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
# wide&deep nn
input_ = keras.layers.Input(shape=X_train.shape[1:])
hidden1 = keras.layers.Dense(30, activation="relu")(input_)
hidden2 = keras.layers.Dense(30, activation="relu")(hidden1)
concat = keras.layers.concatenate([input_, hidden2]) # connect input and output directly
output = keras.layers.Dense(1)(concat)
model = keras.models.Model(inputs=[input_], outputs=[output])
# multiple input
input_A = keras.layers.Input(shape=[5], name="wide_input")
input_B = keras.layers.Input(shape=[6], name="deep_input")
hidden1 = keras.layers.Dense(30, activation="relu")(input_B)
hidden2 = keras.layers.Dense(30, activation="relu")(hidden1)
concat = keras.layers.concatenate([input_A, hidden2])
output = keras.layers.Dense(1, name="output")(concat)
model = keras.models.Model(inputs=[input_A, input_B], outputs=[output])
# wide&deep nn and auxiliary output
input_A = keras.layers.Input(shape=[5], name="wide_input")
input_B = keras.layers.Input(shape=[6], name="deep_input")
hidden1 = keras.layers.Dense(30, activation="relu")(input_B)
hidden2 = keras.layers.Dense(30, activation="relu")(hidden1)
concat = keras.layers.concatenate([input_A, hidden2])
output = keras.layers.Dense(1, name="main_output")(concat)
aux_output = keras.layers.Dense(1, name="aux_output")(hidden2)
model = keras.models.Model(inputs=[input_A, input_B],
outputs=[output, aux_output])
Subclassing API
- Both the Sequential API and the Functional API are declarative
- start by declaring which layers you want to use and how they should be connected
- then can you start feeding the model some data for training or inference
- pros
- the model can easily be saved, cloned, and shared
- its structure can be displayed and analyzed
- the framework can infer shapes and check types
- It’s also fairly easy to debug
- dynamic models
- Some models involve loops, varying shapes, conditional branching, and other dynamic behaviors
- notes
- your model’s architecture is hidden within the call() method, so Keras cannot easily inspect it
- cannot save or clone it
- don’t know how layers are connected with each other
- it is easier to make mistakes
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
class WideAndDeepModel(keras.models.Model):
def __init__(self, units=30, activation="relu", **kwargs):
super().__init__(**kwargs)
self.hidden1 = keras.layers.Dense(units, activation=activation)
self.hidden2 = keras.layers.Dense(units, activation=activation)
self.main_output = keras.layers.Dense(1)
self.aux_output = keras.layers.Dense(1)
def call(self, inputs):
input_A, input_B = inputs
hidden1 = self.hidden1(input_B)
hidden2 = self.hidden2(hidden1)
concat = keras.layers.concatenate([input_A, hidden2])
main_output = self.main_output(concat)
aux_output = self.aux_output(hidden2)
return main_output, aux_output
model = WideAndDeepModel(30, activation="relu")
Saving and Restoring models
1
2
3
4
5
6
7
# static models
model.save("my_keras_model.h5")
model = keras.models.load_model("my_keras_model.h5")
# dynamic models
model.save_weights("my_keras_weights.ckpt")
model.load_weights("my_keras_weights.ckpt")
Callbacks
-
Intro
The fit() method accepts a callbacks argument that lets you specify a list of objects that Keras will call
-
at the start and end of training,
-
at the start and end of each epoch,
-
and before and after processing each batch
-
-
ModelCheckpoint
-
the ModelCheckpoint callback saves checkpoints of your model at regular intervals during training, by default at the end of each epoch
-
you can set
save_best_only=Truewhen creating the ModelCheckpoint, it will only save your model when its performance on the validation set is the best so far -
1 2
checkpoint_cb = keras.callbacks.ModelCheckpoint("my_keras_model.h5") history = model.fit(X_train, y_train, epochs=10, callbacks=[checkpoint_cb])
-
-
EarlyStopping
-
It will interrupt training when it measures no progress on the validation set for a number of epochs (defined by the
patienceargument), and it will optionally roll back to the best model. -
1 2 3 4 5 6
checkpoint_cb = keras.callbacks.ModelCheckpoint("my_keras_model.h5", save_best_only=True) early_stopping_cb = keras.callbacks.EarlyStopping(patience=10, restore_best_weights=True) history = model.fit(X_train, y_train, epochs=100, validation_data=(X_valid, y_valid), callbacks=[checkpoint_cb, early_stopping_cb])
-
-
Customized callbacks
-
1 2 3 4
class PrintValTrainRatioCallback(keras.callbacks.Callback): def on_epoch_end(self, epoch, logs): ratio = logs["val_loss"] / logs["loss"]) print(f"\nval/train: {ratio}")
-
also can implement
on_train_begin()on_epoch_begin()on_batch_begin()on_test_begin()(called byevaluate())on_test_batch_begin()on_predict_begin()(called bypredict())
-
TensorBoard
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
root_logdir = os.path.join(os.curdir, "my_logs")
def get_run_logdir():
import time
run_id = time.strftime("run_%Y_%m_%d-%H_%M_%S")
return os.path.join(root_logdir, run_id)
run_logdir = get_run_logdir()
run_logdir
## tensorboard callbacks
tensorboard_cb = keras.callbacks.TensorBoard(run_logdir)
history = model.fit(X_train, y_train, epochs=30,
validation_data=(X_valid, y_valid),
callbacks=[checkpoint_cb, tensorboard_cb])
# in jupyter notebook
%load_ext tensorboard
%tensorboard --logdir=./my_logs --port=6006 --host=0.0.0.0
Hyperparameter tuning
- number of hidden layers
- start with just one or two hidden layers
- For more complex problems, you can ramp up the number of hidden layers until you start overfitting the training set.
- number of neurons per hidden layer
- The number of neurons in the input and output layers is determined by the type of input and output your task requires
- typically puts the same number of neurons in each hidden layer
- it’s often simpler and more efficient to pick a model with more layers and neurons than you actually need, then use early stopping and other regularization techniques to prevent it from overfitting.
- learning_rate
- the optimal learning rate is about half of the maximum learning rate
- the learning rate above which the training algorithm diverges
- the optimal learning rate is about half of the maximum learning rate
- Optimizer
- batch_size
- can have a significant impact on your model’s performance and training time
- large batch size:
- hardware accelerators like GPUs can process them efficiently, so the training algorithm will see more instances per second
- sizes often lead to training instabilities
- the resulting model may not generalize as well as a model trained with a small batch size.
- activation function
- in general, the ReLU activation function will be a good default for all hidden layers
- number of iterations
- in most cases does not actually need to be tweaked: just use early stopping instead.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
from scipy.stats import reciprocal
from sklearn.model_selection import RandomizedSearchCV
def build_model(n_hidden=1, n_neurons=30, learning_rate=3e-3, input_shape=[8]):
model = keras.models.Sequential()
model.add(keras.layers.InputLayer(input_shape=input_shape))
for layer in range(n_hidden):
model.add(keras.layers.Dense(n_neurons, activation="relu"))
model.add(keras.layers.Dense(1))
optimizer = keras.optimizers.SGD(lr=learning_rate)
model.compile(loss="mse", optimizer=optimizer)
return model
# use sklearn api
keras_reg = keras.wrappers.scikit_learn.KerasRegressor(build_model)
param_distribs = {
"n_hidden": [0, 1, 2, 3],
"n_neurons": np.arange(1, 100) .tolist(),
"learning_rate": reciprocal(3e-4, 3e-2) .rvs(1000).tolist(),
}
rnd_search_cv = RandomizedSearchCV(keras_reg, param_distribs, n_iter=10, cv=3, verbose=2)
rnd_search_cv.fit(X_train, y_train, epochs=100,
validation_data=(X_valid, y_valid),
callbacks=[keras.callbacks.EarlyStopping(patience=10)])